Softwareoplossingen: Til Uw Robotica-Ervaring naar een Hoger Niveau
RoboShoplite: Uw Portaal voor Naadloze Robot-simulaties
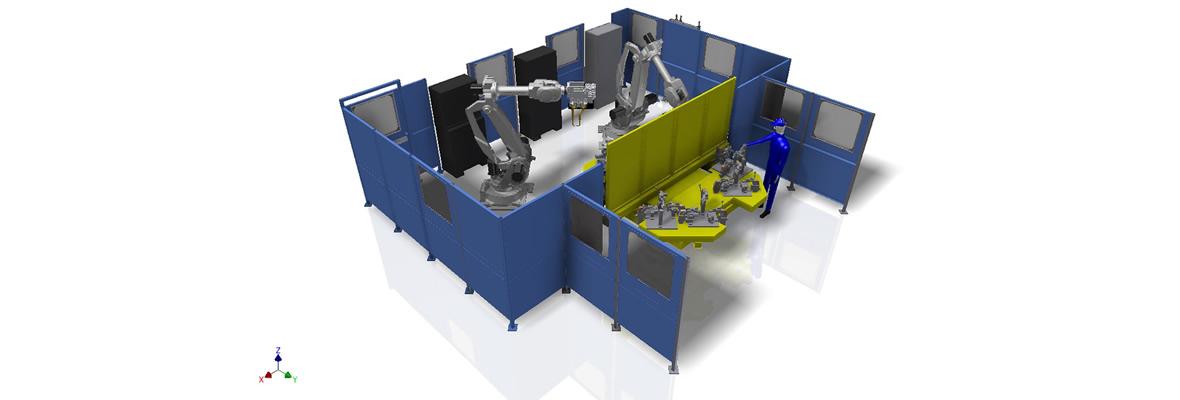
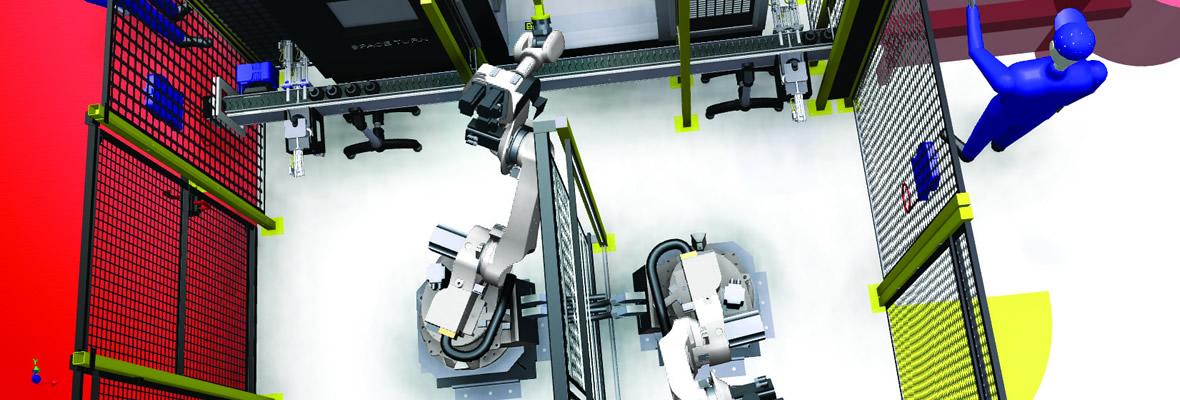
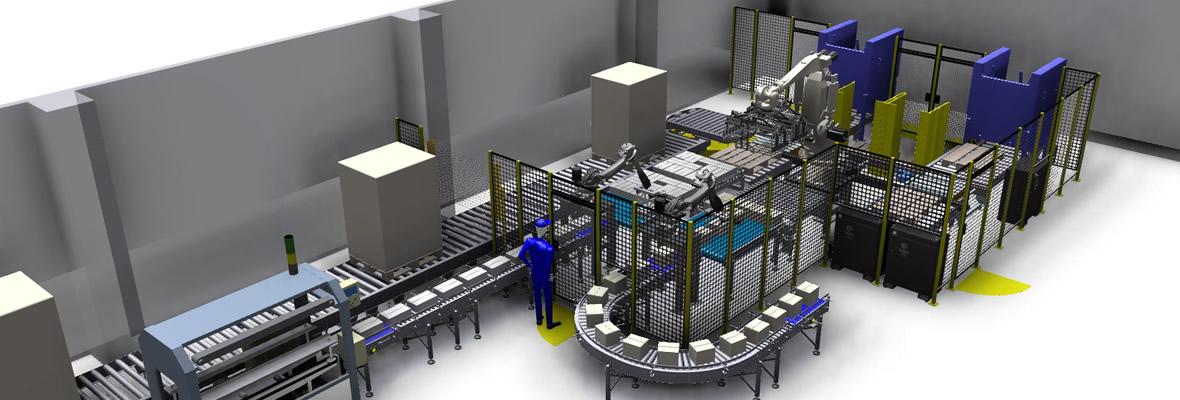
Maak een 3D-simulatie met Comau-robots door eenvoudig het bestand te installeren via de downloadknop.
Neem contact op met het Robotics Benelux-team om een License Key te verkrijgen.
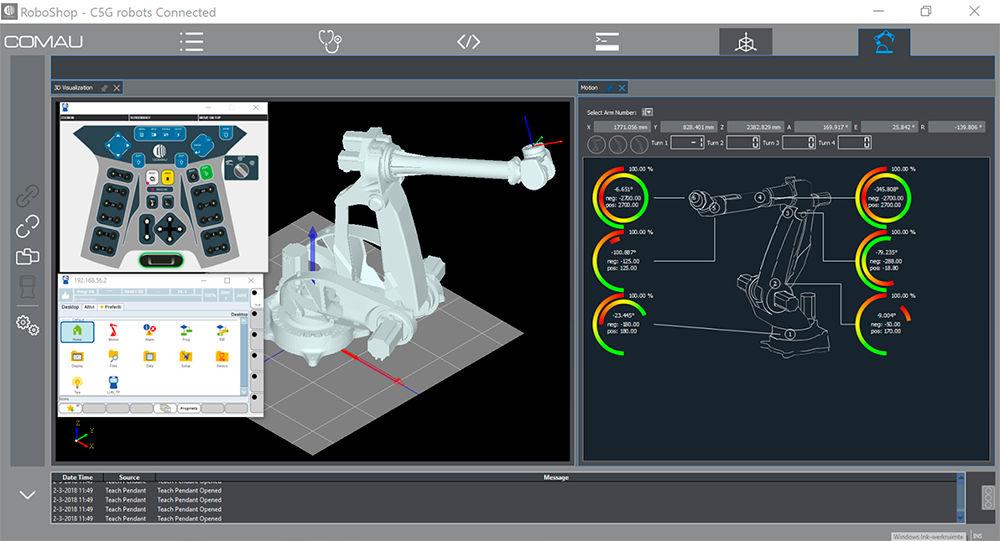
Bekijk een screenshot van het programma:
Producten
Main Menu
Softwarefunctionaliteiten: Optimaliseer de Robotprestaties
- Automatische Payload Identificatie: Automatische herkenning van de payload optimaliseert de robotbewegingen.
- Botsdetectie: Noodstop van de robot bij een botsing beschermt de mechanica en apparatuur.
- Coöperatieve en Gesynchroniseerde Beweging: Gecoördineerde en gelijktijdige aansturing van meerdere robots en hulpassen (lineaire track, servo gun, positioners en andere applicatieapparatuur).
- Conveyor- en Sensor Tracking: Volg onderdelen op lineaire en circulaire conveyors; nauwkeurige padtracking van verschillende typen externe sensoren.
- Joint Soft Servo Technologie: Laat individuele robotassen toe om mee te geven aan externe krachten, zoals vereist door de specifieke toepassing.
- Interferentieregions: Beperk het werkgebied van de robot door dynamisch regio’s van verschillende vormen te definiëren.
- Robot Absolute Nauwkeurigheid: Een algoritme dat de daadwerkelijke kinematica aanpast aan het theoretische model dat offline is geprogrammeerd.
- Robosim Pro: 3D offline programmering.
Applicatiesoftware: Verbetering van Robotprestaties en Functionaliteit
Onze applicatiesoftwarepakketten beheren de meest gebruikte technologische processen en bevatten een gebruiksvriendelijke GUI voor het invoeren van procesparameters, aanpassen van procesgedrag en monitoren van status.
- SmartRivet: Voorgeprogrammeerde technische instructies om rivetsystemen te beheren, zonder integratie of extra programmeercode.
- SmartIP Interpress: Beheert het volledige interpress-proces met een gebruiksvriendelijke interface voor:
- Interpress transfer cycli
- Lijnladingscycli vanaf de centering table
- Lijnontladingscycli van tafel of mat
- Hand-over cycli met onderdeeloverdracht
- Cycli met overdracht naar een tussenliggende tafel
- Dubbele pick-up en deposit cycli
- SmartTool Change: Beheert eenvoudig uw Tool Change-systemen; selecteer apparaten en de software regelt de rest.
- SmartStud: Klaar-voor-gebruik instructies voor stud welding systemen en veelgebruikte fieldbussen.
- SmartArc: Stelt de operator in staat lasparameters in te stellen en het systeem volledig te beheren via de teach pendant.
- SmartGlue: Ondersteunt volledig het aanleveren, lijmen en afdichten van materialen.
- SmartHand: Beheert gereedschappen zoals grijpers die aan het robotarmuiteinde worden bevestigd voor materiaalhantering.
- SmartSpot: Volledige ondersteuning en beheer van weerstandslasprocessen.
- Palletizing Motion: Optionele functie voor 6-assige anthropomorfe of parallelogram-robots met bolvormige pols, zodat ze als palletizer kunnen functioneren; flange blijft parallel aan de vloer.
- Axes Pursuit: Maakt het mogelijk dat assen van één arm gevolgd worden door assen van een andere arm, in zowel Automatische als Programmeermodus.
- Interferentieregions: Monitoren continu de robot en vertraagt of stopt automatisch de snelheid bij “Forbidden Regions” en versnelt in “Allowed Regions”.
- Wrist Singularity Management: Optionele functie voor SMART robots met bolvormige pols; helpt bij programmering rond polssingulariteiten door de trajectplanner automatisch aan te passen.
- Weaving Motion: Oscillerende beweging bovenop een cartesiaanse traject voor gelijkmatige materiaaldeling, toegepast bij arc-welding en sommige lijm- en afdichtprocessen.